Introduction to Microcontroller Systems
3.1 Microcontroller Components
Microcontrollers are compact integrated circuits designed for embedded applications. They typically consist of the following key components:
1. Central Processing Unit (CPU):
The CPU is the core of the microcontroller, responsible for executing instructions and performing calculations. It’s optimized for embedded systems, often prioritizing low power consumption over high performance.
2. Memory:
Microcontrollers incorporate different types of memory:
- Flash memory: Stores the program code
- RAM: Holds variables and data during operation
- EEPROM: Non-volatile memory for storing configuration data
3. Input/Output (I/O) Ports:
I/O ports allow the microcontroller to interact with external devices. These can include:
- Digital I/O pins: For interfacing with sensors and actuators
- Analog I/O: Often including Analog-to-Digital Converters (ADC) for reading analog signals.
4. Timers/Counters:
These components measure time intervals and count events, crucial for tasks like generating PWM signals or measuring input frequencies.
5. Interrupt Controller:
Manages interrupt requests from various sources, allowing the microcontroller to respond to external events quickly
6. Communication Interfaces:
Many microcontrollers include built-in interfaces such as UART, SPI, I2C, and sometimes USB or Ethernet for communication with other devices.
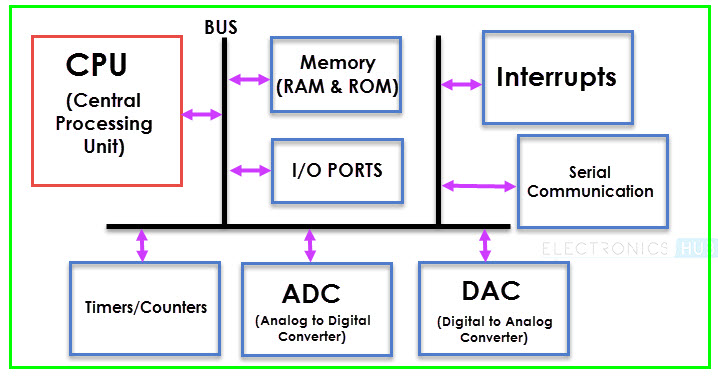
Figure 1: Microcontroller Component
3.2 Embedded System Concepts
Embedded systems are specialized computing systems designed to perform dedicated functions within larger systems. Key concepts include:
- Real-time operation: Many embedded systems must respond to events within strict time constraints.
- Resource constraints: Embedded systems often have limited processing power, memory, and energy resources.
- Reliability: These systems must operate reliably, often in harsh environments or safety-critical applications.
- Integration: Embedded systems are tightly integrated with their surrounding hardware and environment.
3.3 Types of Microcontrollers
Microcontrollers are categorized based on their data bus width:1. 8-bit Microcontrollers:
- Can process 8 bits of data at a time
- Suitable for simple applications with low processing requirements
- Examples: Atmel AVR, PIC16 series
- Advantages: Low cost, low power consumption
- Limitations: Limited processing power, smaller address space (typically up to 64 KB).
2. 16-bit Microcontrollers:
- Can process 16 bits of data at a time
- Offer a balance between processing power and energy efficiency
- Examples: PIC24, MSP430
- Advantages: Higher processing power than 8-bit, still relatively low power consumption
- Limitations: More expensive than 8-bit, less powerful than 32-bit.
3. 32-bit Microcontrollers:
- Can process 32 bits of data at a time
- Suitable for complex applications requiring significant processing power
- Examples: ARM Cortex-M series, PIC32
- Advantages: High processing power, large address space (up to 4 GB)
- Limitations: Higher cost and power consumption compared to 8-bit and 16-bit options.
3.4 Common Microcontroller Families
1. PIC (Peripheral Interface Controller):
- Developed by Microchip Technology
- Wide range of 8-bit, 16-bit, and 32-bit options
- Known for reliability and robustness
- Rich set of peripherals and modules
- Challenges: Can be complex to program for beginners.
2. AVR:
- Developed by Atmel (now part of Microchip)
- Popular among hobbyists and in educational settings
- Easy to program and debug
- Low power consumption
- Limitations: Limited memory and peripheral capacity in some models.
3. ARM:
- Developed by ARM Holdings
- Dominates the 32-bit microcontroller market
- High performance and energy efficiency
- Widely used in smartphones, tablets, and other complex embedded systems
- Extensive ecosystem and development tools
- Challenges: Can be more complex for simple applications.
Each microcontroller family has its strengths and is suited for different types of applications. The choice between them often depends on factors such as processing requirements, power constraints, development ecosystem, and familiarity with the platform.
In the next chapter, we’ll explore how to start programming these microcontrollers and implement basic input/output operations.
Deepen your understanding: Watch the accompanying lecture video to delve deeper into the concepts covered in the reading.
