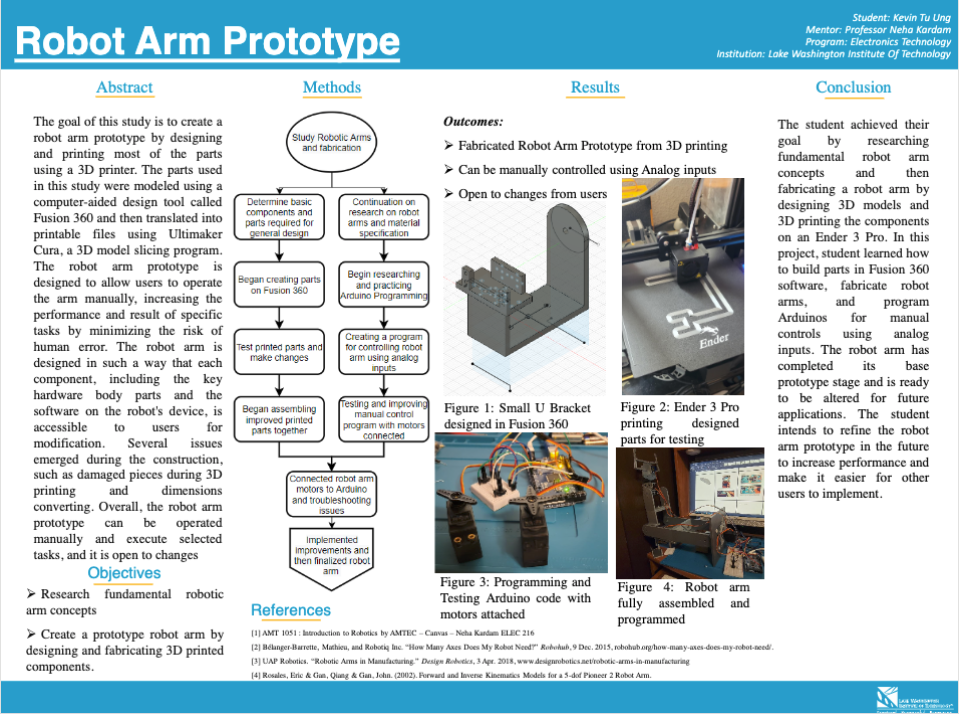
Robot Arm Prototype
Kevin Ung
Note: Click on image to access poster
Summary
The goal of this study is to create a robot arm prototype by designing and printing most of the parts using a 3D printer. The parts used in this study were modeled using a computer-aided design tool called Fusion 360 and then translated into printable files using Ultimaker Cura, a 3D model slicing program. The robot arm prototype is designed to allow users to operate the arm manually, increasing the performance and result of specific tasks by minimizing the risk of human error. The robot arm is designed in such a way that each component, including the key hardware body parts and the software on the robot’s device, is accessible to users for modification. Several issues emerged during the construction, such as damaged pieces during 3D printing and dimensions converting. Overall, the robot arm prototype can be operated manually and execute selected tasks, and it is open to changes.
